RINF 2026: What Railway Infrastructure Managers Need to Know
Visit our dedicated RINF roadmap site: roadmap2rinf.eu The European railway infrastructu ...
Published on: February 25, 2019
This tutorial briefly describes the ZED Stereo Camera and the concept of Visual Odometry. It also provides a step-by-step guide for installing all required dependencies to get the camera and visual odometry up and running. Lastly, it offers a glimpse of 3D Mapping using the RTAB-Map visual SLAM algorithm.
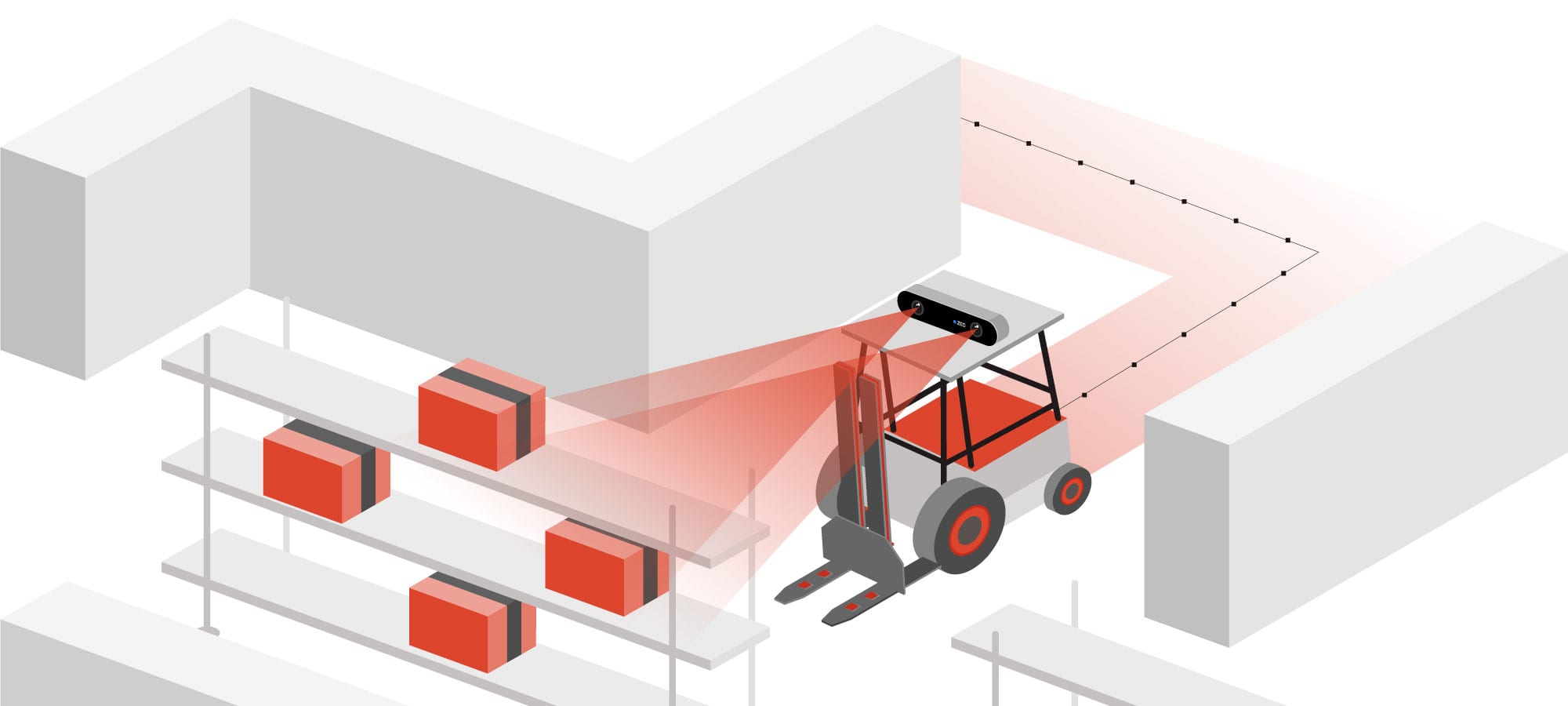

The ZED Stereo Camera developed by STEREOLABS is a camera system based on the concept of human stereovision. In addition to viewing RGB, stereovision also allows the perception of depth. Advanced computer vision and geometric techniques can use depth perception to accurately estimate the 6DoF pose (x,y,z,roll,pitch,yaw) of the camera and therefore also the pose of the system it is mounted on. At the same time, it provides high quality 3D point clouds, which can be used to build 3D metric maps of the environment.
The camera can generate VGA (100Hz) to 2K (15Hz) stereo image streams. The 12cm baseline (distance between left and right camera) results in a 0.5-20m range of depth perception, about four times higher than the widespread Kinect Depth sensors. Furthermore, one of the most striking advantages of this stereo camera technology is that it can also be used outdoors, where IR interference from sunlight renders structured-light-type sensors like the Kinect inoperable. As a result, this system is ideal for robots or machines that operate indoors, outdoors or both. It can also be used for many different applications, ranging from pose estimation, mapping, autonomous navigation to object detection and tracking and many more.
Visual Odometry is the process of estimating the motion of a camera in real-time using successive images. There are many different camera setups/configurations that can be used for visual odometry, including monocular, stereo, omni-directional, and RGB-D cameras. The cheapest solution of course is monocular visual odometry. However, with this approach it is not possible to estimate scale. This can be solved by adding a camera, which results in a stereo camera setup.
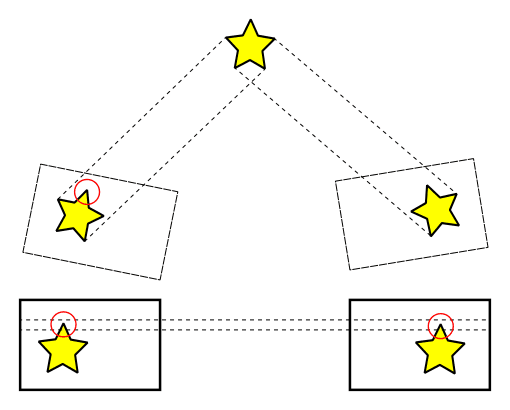
The following approach to stereo visual odometry consists of five steps. Firstly, the stereo image pair is rectified, which undistorts and projects the images onto a common plane. Feature detection extracts local features from the two images of the stereo pair. Then, Stereo Matching tries to find feature correspondences between the two image feature sets. Since the images are rectified, the search is done only on the same image row. Usually the search is further restricted to a range of pixels on the same line. There is also an extra step of feature matching, but this time between two successive frames in time. Finally, an algorithm such as RANSAC is used for every stereo pair to incrementally estimate the camera pose. This is done by using the features that were tracked in the previous step and by rejecting outlier feature matches.
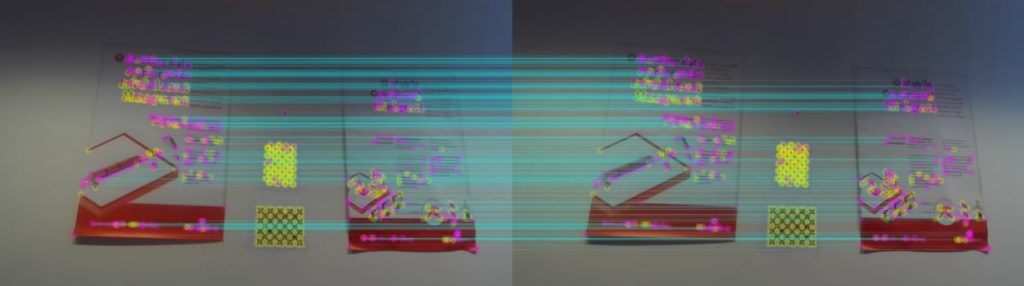
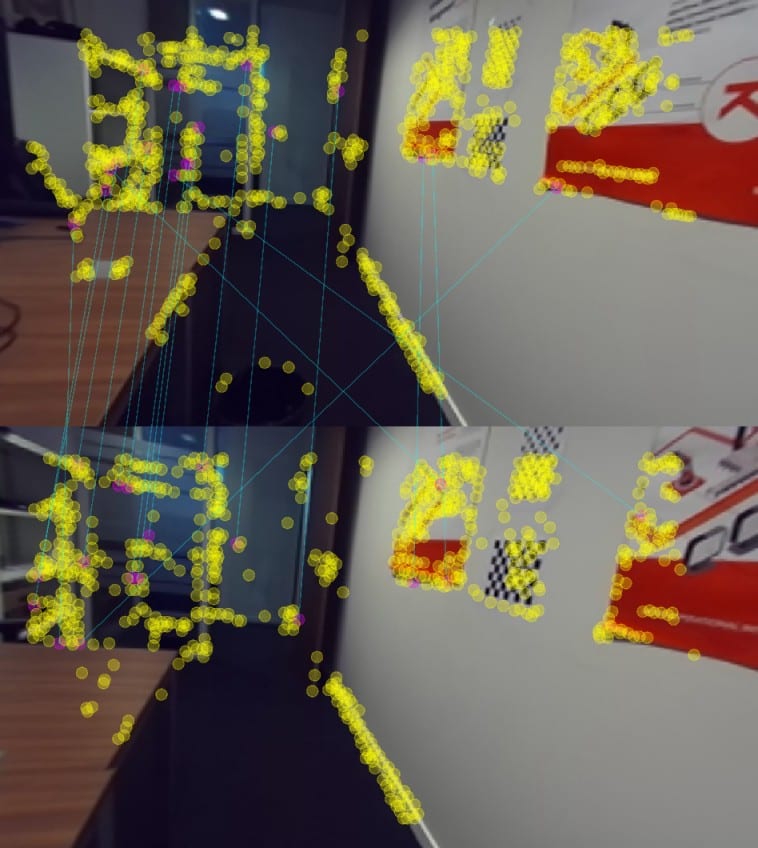
Due to the incremental nature of this particular type of pose estimation, error accumulation is inevitable. The longer the system operates, the bigger the error accumulation will be. Therefore, we need to improve the visual odometry algorithm and find a way to counteract that drift and provide a more robust pose estimate. This can be done with loop closure detection. This technique offers a way to store a dictionary of visual features from visited areas in a bag-of-words approach. This dictionary is then used to detect matches between current frame feature sets and past ones. If a match is found, a transform is calculated and it is used to optimize the trajectory graph and to minimize the accumulated error.
Visual Odometry algorithms can be integrated into a 3D Visual SLAM system, which makes it possible to map an environment and localize objects in that environment at the same time. RTAB-Map is such a 3D Visual SLAM algorithm. It consists of a graph-based SLAM approach that uses external odometry as input, such as stereo visual odometry, and generates a trajectory graph with nodes and links corresponding to past camera poses and transforms between them respectively. Each node also contains a point cloud, which is used in the generation of the 3D metric map of the environment. Since RTAB-Map stores all the information in a highly efficient short-term and long-term memory approach, it allows for large-scale lengthy mapping sessions. Loop closure detection also enables the recognition of revisited areas and the refinement of its graph and subsequent map through graph optimization.
The following instructions show you how to install all the dependencies and packages to start with the ZED Stereo Camera and Visual Odometry
Note: You can skip the kernel upgrade and the installation of the NVIDIA driver and CUDA if you already have installed versions and you don’t want to upgrade to the latest versions. However, in order to work with the ZED Stereo Camera, you need to install a version of the ZED SDK that is compatible with your CUDA. Search the website of STEREOLABS for a legacy version of the SDK.
Find your kernel version by running:
$ uname -r
Install the Ubuntu Kernel Update Utility (UKUU) and run the tool to update your kernel:
$ sudo add-apt-repository ppa:teejee2008/ppa
$ sudo apt update
$ sudo apt install ukuu
$ ukuu-gtk
After the installation has been completed, reboot the computer and run the first command again to see if you have booted with the new kernel.
$ sudo apt-get purge *nvidia* # remove old version
$ sudo add-apt-repository ppa:graphics-drivers
$ sudo apt update
$ sudo apt install nvidia-driver-415 # change 415 to whatever version is compatible with your graphics card
$ sudo apt-mark hold nvidia-driver-415 # block nvidia driver updates
After the installation has been completed, reboot the computer and check whether the driver is active by running:
$ nvidia-smi
$ export PATH=$PATH:/usr/local/cuda-10.0/bin
$ export LD_LIBRARY_PATH=$LD_LIBRARY_PATH:/usr/local/cuda-10.0/lib64 # or /usr/local/cuda-10.0/lib for 32 bit systems
With CUDA 10 installed, you can install the latest ZED SDK.
$ wget https://www.stereolabs.com/developers/downloads/ZED_SDK_Ubuntu18_v2.7.1.run
$ chmod +x ZED_SDK_Ubuntu18_v2.7.1.run
$ sh ZED_SDK_Ubuntu18_v2.7.1.run
Follow the instructions of the installer and when finished, test the installation by connecting the camera and by running the following command to open the ZED Explorer:
$ /usr/local/zed/tools/ZED\ Explorer
$ sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
$ sudo apt-key adv --keyserver hkp://ha.pool.sks-keyservers.net:80 --recv-key 421C365BD9FF1F717815A3895523BAEEB01FA116
$ sudo apt update
$ sudo apt install ros-melodic-desktop-full
$ sudo rosdep init
$ rosdep update
$ sudo apt install python-rosinstall python-rosinstall-generator python-wstool build-essential
Copy the following commands to your .bashrc or .zshrc
$ source /opt/ros/melodic/setup.bash
$ source ~/.bashrc
or
$source ~/.zshrc
$ sudo apt install python-catkin-tools
$ mkdir -p ~/catkin_ws/src
$ git clone git@github.com:stereolabs/zed-ros-wrapper.git ~/catkin_ws/src/zed-ros-wrapper
$ cd ~/catkin_ws
$ rosdep install --from-paths src --ignore-src --rosdistro $ROS_DISTRO -yr
$ catkin build zed_wrapper
$ source ~/.bashrc # or ~/.zshrc
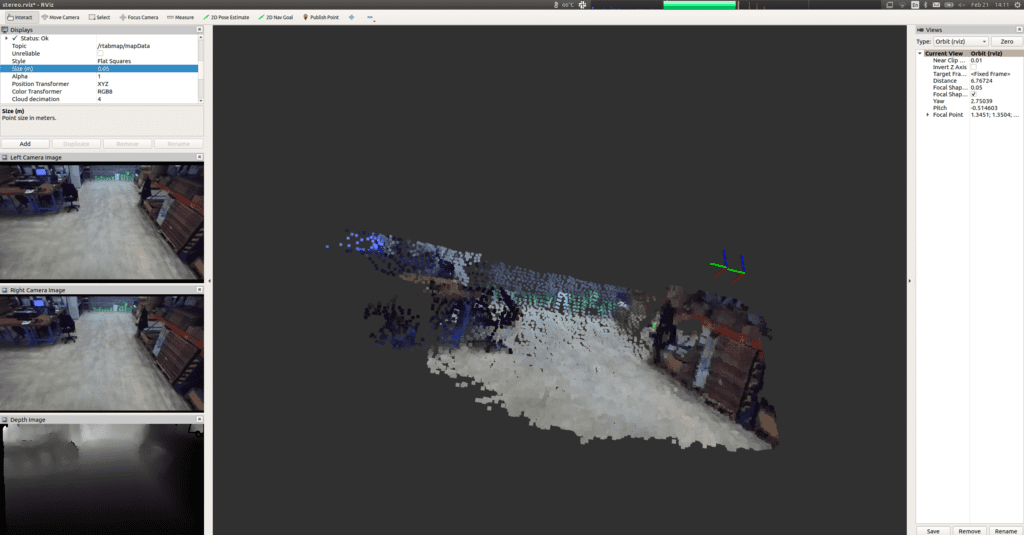
In order to launch the ZED node that outputs Left and Right camera RGB streams, Depth, and Odometry, simply run the following command. You should see the rviz visualization as displayed below.
$ roslaunch zed_display_rviz display.launch
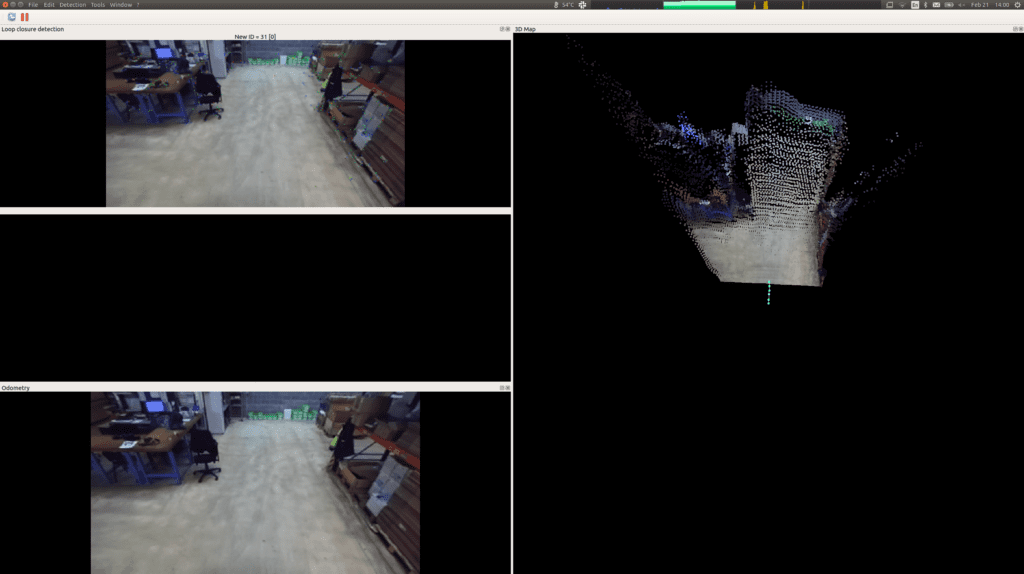
In order to get a taste of 3D mapping with the ZED Stereo Camera, install rtabmap and rtabmap_ros and run the corresponding launcher. You should see the rtabmapviz visualization as displayed below.
$ sudo apt install ros-melodic-rtabmap ros-melodic-rtabmap-ros
$ catkin build zed_rtabmap_example # contained on the zed_ros_wrapper repository
$ source ~/.bashrc # or ~/.zshrc
$ roslaunch zed_rtabmap_example zed_rtabmap.launch
Assuming you have already installed RTAB-Map from the previous section, in this section you can learn how to record a session with ZED and playing it back for experimentation with different parameters of RTAB-Map.
First of all, clone and build our repository with the required launchers as shown below:
$ git clone git@github.com:Kapernikov/zed_visual_odometry.git
$ catkin build zed_visual_odometry
$ source ~/.bashrc # or ~/.zshrc
Then connect a ZED Stereo Camera on your computer and launch the recorder:
$ roslaunch zed_visual_odometry zed_rtabmap_db_recorder.launch
Do your session with the camera and when you are done, simply close the recorder (ctrl+c). The database of the session you recorded will be stored in ~/.ros/output.db. You can now launch the playback node along with rtabmap by calling the corresponding launcher as follows:
$ roslaunch zed_visual_odometry zed_rtabmap_db_playback.launch
If you are not satisfied with the results, play around with the parameters of the configuration file located inside our repository (zed_visual_odometry/config/rtabmap.ini) and rerun the playback launcher.