Interview with Zowi: AI for Marine Survey Data at GEOxyz
"We help GEOxyz survey the seabed efficien ...
Published on: August 31, 2018
Kapernikov has recently developed a method to detect vegetation overgrowth alongside Belgium’s railway tracks. No luxury for railway operator Infrabel, because efficient vegetation management is critical to keep our railways safe.
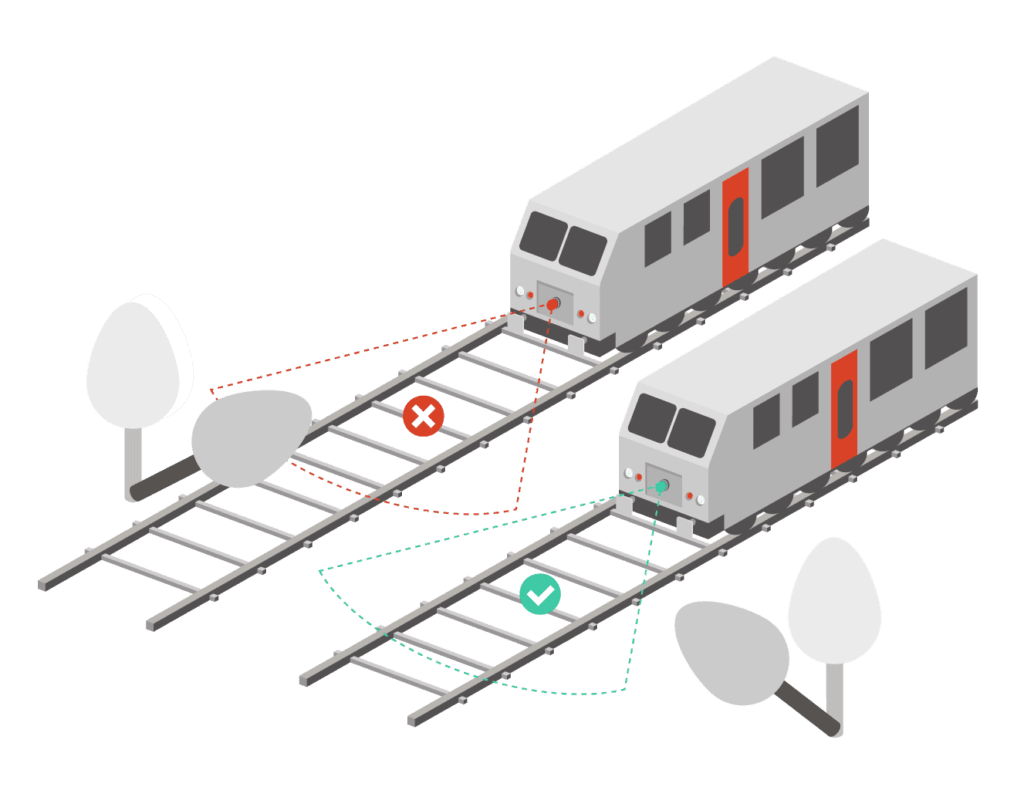
The overgrowth of plants and weeds on railway lines poses a safety problem. Not only can these plants obstruct the driver’s view, but they can also obscure certain signals, interfere with overhead contact lines and even hinder the movement of the train. Rail companies therefore need to manage vegetation efficiently and maintain the railway lines properly. A first step in this approach is to know exactly where this uncontrolled growth of vegetation is located.
If not detected automatically, problematic vegetation areas and pruning zones need to be identified ‘manually’ by maintenance teams. This can be a time-consuming and expensive task. In order to do this more efficiently, Infrabel teamed up with Kapernikov. Based on 3D Lidar data sets provided by Infrabel, Kapernikov developed an automatic solution for vegetation detection.
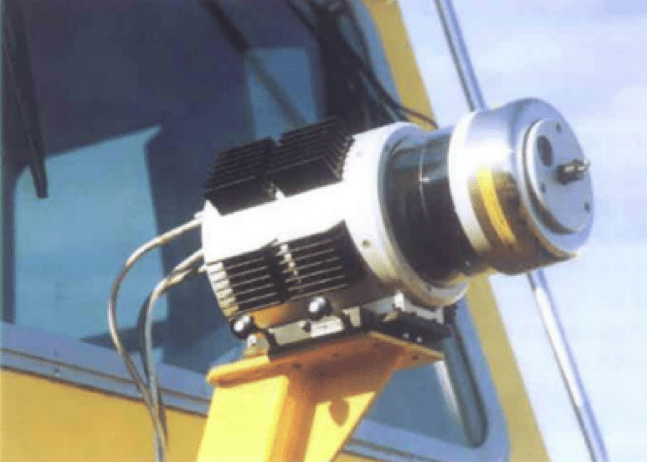
Lidar (Light Detection And Ranging) is a technology that combines one or more laser scanners with an IMU (Inertial Measurement Unit) and a GPS. With this combination, it is possible to produce dense and accurate 3D information.
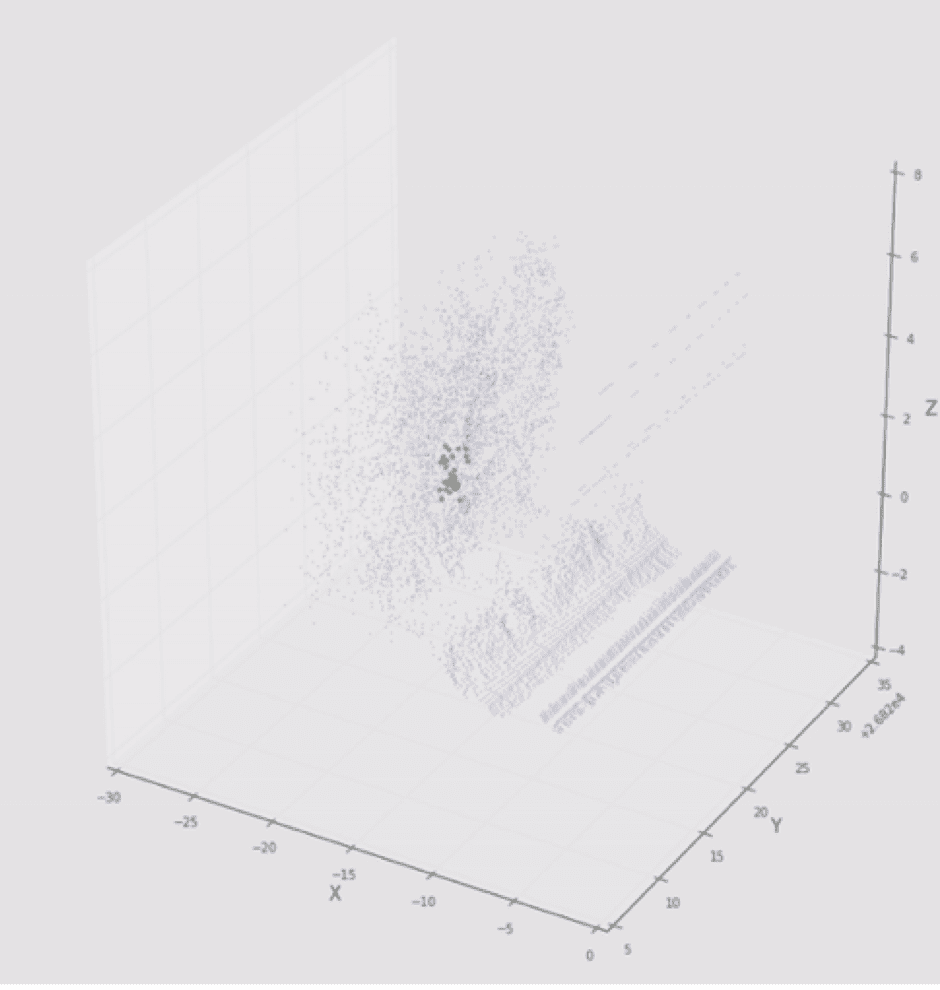
The laser scanner uses light in the form of pulsed laser and measures the time that the laser needs to meet an object, and to be reflected back to the scanner’s sensor (time-of-flight). Knowing the speed of light, these times can be converted to distances between the scanner and the objects. These distances, combined with information about the exact location of the scanner at the time of measurement, can then be converted into 3D coordinates. This collection of 3D coordinates is what we call a ‘point cloud’, a data structure that can accurately describe the 3D geometry of objects.
Lidar systems have a variety of applications in many fields, such as geology, forestry, seismology and archaeology. A Lidar system, depending on the platform on which it is mounted, can be classified into aerial, terrestrial or mobile systems. In the case of Infrabel, a mobile Lidar system is used; the laser scanner is mounted on an EM130 vehicle, a data collection train, and it collects sweeps of points as the train moves.

The train is scheduled to collect data for every railway line in Belgium at least twice per year.



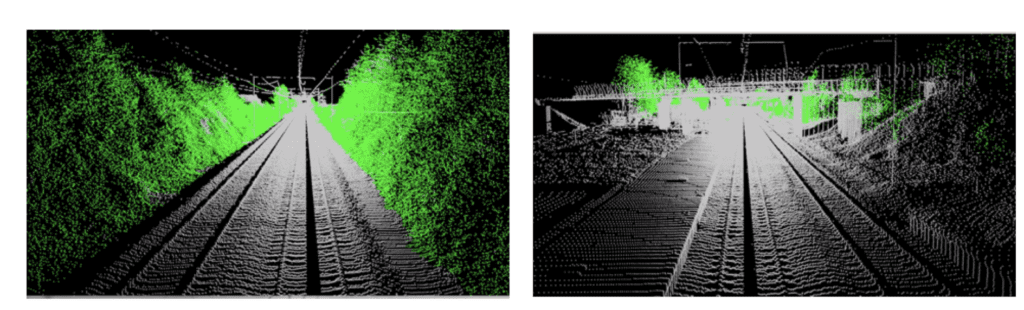
Obviously, scanning the environment is not enough. The collected data must be turned into meaningful information. Based on data from the point cloud, we needed to be able to make a meaningful distinction between vegetation and non-vegetation. Kapernikov therefore developed an algorithm to automatically identify regions that needed to be cleared and to recognise objects such as poles and other railway infrastructure.
Two primary functions are at work in this algorithm:
With this information, we are able to define the so-called safety and intervention lines (demarcation lines that signify the allowed level of overgrowth), cluster the data points into regions of interest and finally generate alerts based on the position of each region of interest.
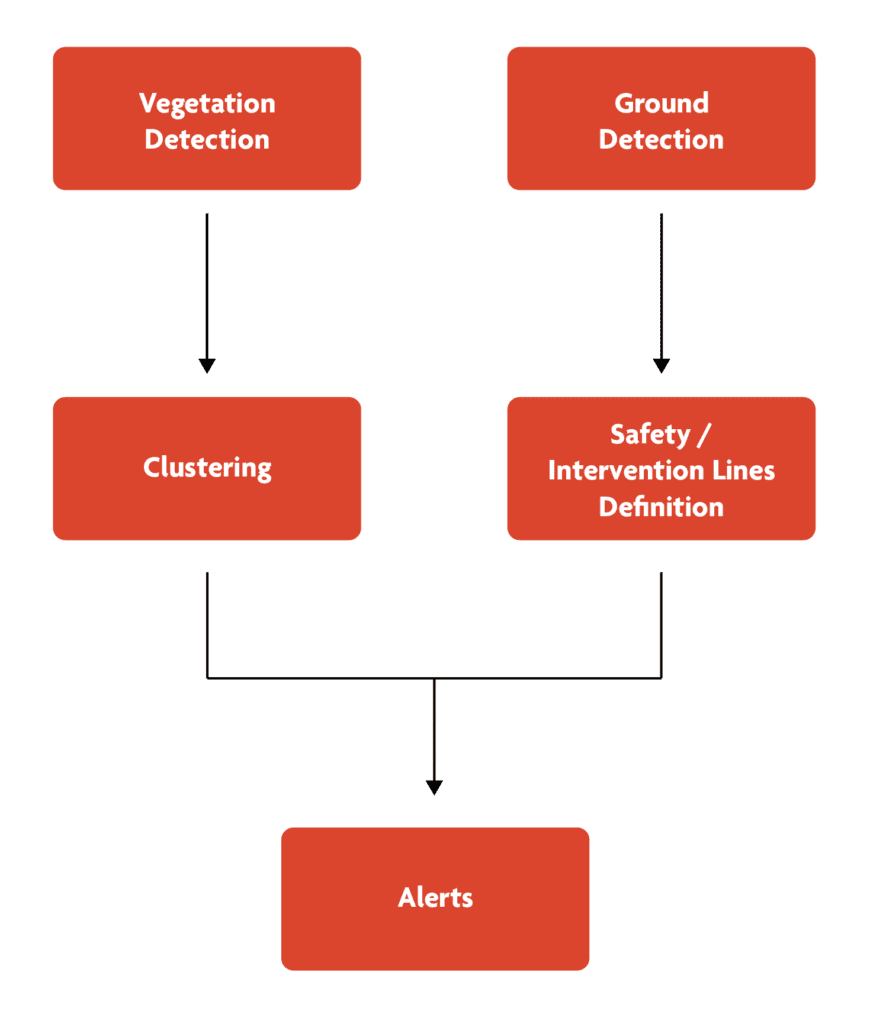
Our vegetation detection methodology can be described as follows:
Our ground detection methodology is based on active shape models. These are statistical models of the shape of objects which iteratively deform to fit to an example of the object in a new image. In image processing, active shape models are used to find edges and lines in images and referred to as active contours.
In this model for ground detection, the active shape model can be compared to a rigid, elastic rubber cloth being pushed from underneath. The cloth sticks to the lowest points forming a continuous surface.
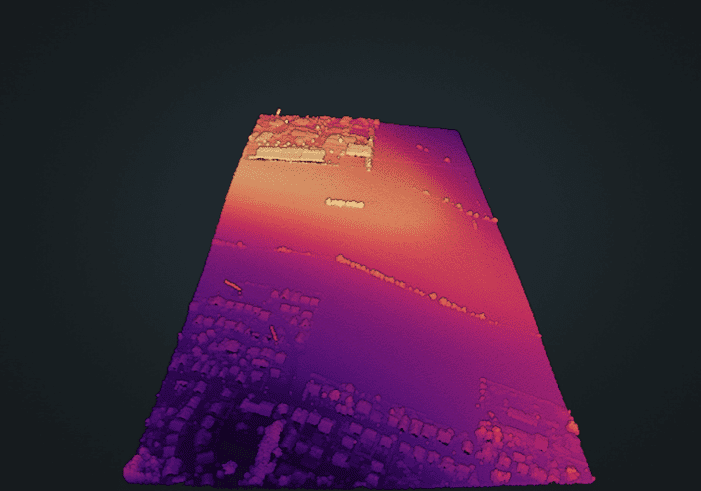
Before: a region with mild ground elevation, buildings and vegetation
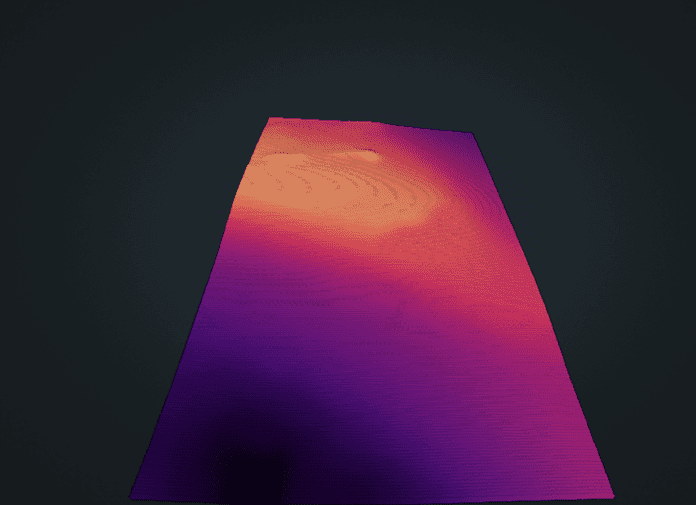
After: the ground has been detected successfully: the elevation is preserved, but the buildings and the vegetation have been eliminated.
Based on the collected detection information and on the determined safety and intervention lines, alerts can be generated.
As an additional rule, the allowed vegetation height is also limited, to the extent that branches or pieces of vegetation falling down should be ending up far enough from the railway tracks. Also, man-made structures and very small point groups should not generate an alert.
The collected 3D data allows Infrabel to manage vegetation more efficiently. Proactive maintenance can be organized and the number of expensive and time-consuming manual checks can be reduced.