Master data management for Elia
As part of Elia’s Uniform Data Management program, Kapernikov developed a centralized reference da ...


Machine vision
TVH Parts, the Belgian specialist in parts for material handling and industrial vehicles, is the expert when it comes to motor drives and forklift mechanics. Set in motion by Amazon’s acquisition of Kiva in 2012, Automated Guided Vehicles (AGVs) have emerged as a flexible and robust alternative for intralogistics. TVH wants to follow this trend towards smart vision guided AGVs and chooses to join forces with Kapernikov.
With the hands-on approach that binds us, we’ve built up an autonomous vehicle platform. It is capable of receiving ERP orders and dispatching those to the AGVs, who in turn handle the transport operations.
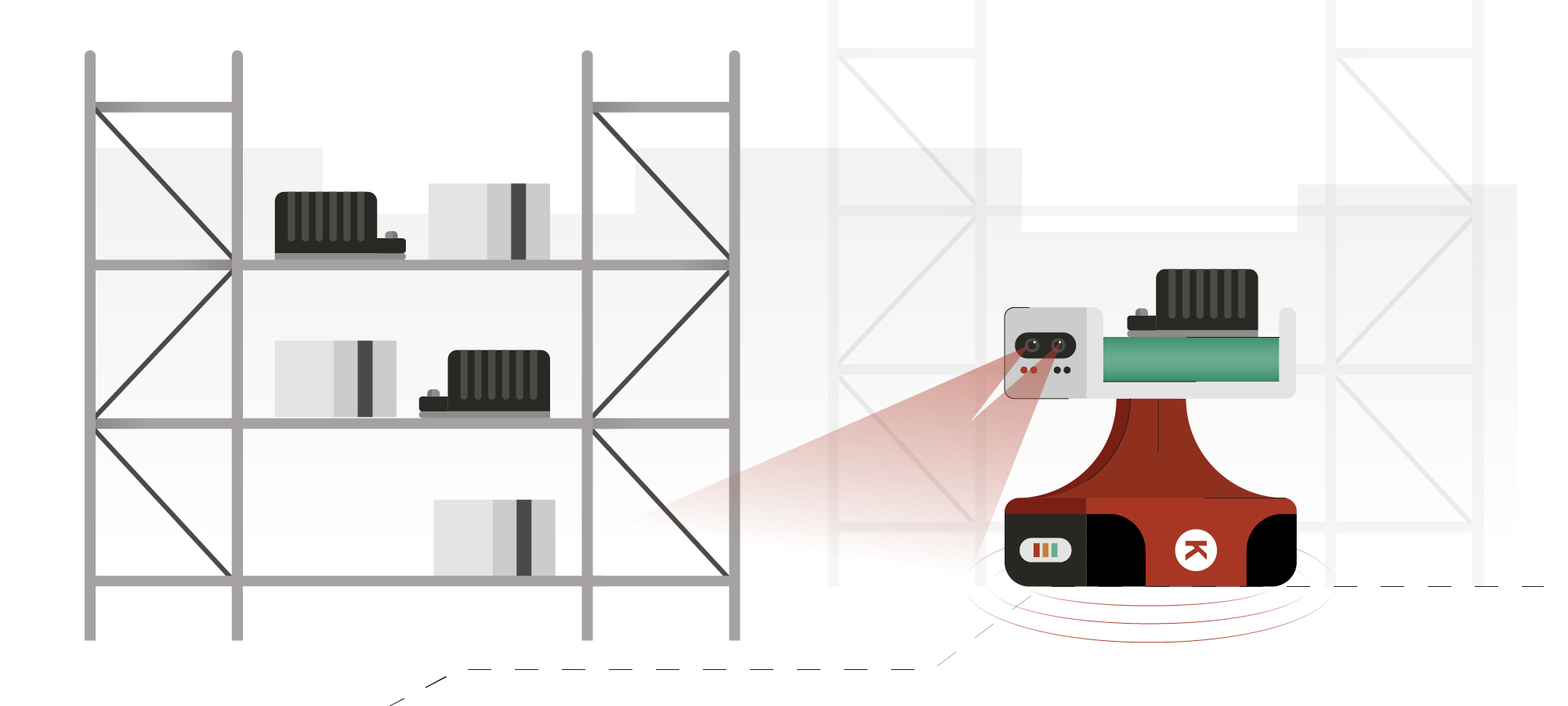
At TVH Parts, thousands of electronic components are repaired each month. All these components have to be taken out of the warehouse and brought back to the conveyor belt by a technician once they have been repaired. This is an ideal use case for an AGV, as they have lots of different locations where repairs can take place.
Last year, TVH designed and built the hardware of a custom AGV. The next step was to build the brain of this device. The AGV must be able to deal with a dynamic environment and to avoid collisions with human coworkers or obstacles on the floor.
What makes up the difference between a forklift truck and an autonomous vehicle? One must add location awareness, navigation skills and machine vision to interpret the dynamic environment.
At Kapernikov, we have lots of experience with these kinds of technologies to create smart machines. In this case, we used the entire navigation stack that is part of ‘Robot Operating System’ (ROS). ROS is an open source robot middleware that was further extended to fulfill all demands of the use cases at TVH. We demonstrated visual guidance, integrated in the ROS navigation. The application for this is to dock the vehicle precisely on an existing conveyor system using Time-of-Flight camera footage.
We selected OpenTCS as the Transportation Control System. This project is maintained by the Fraunhofer IML and has proven to be of good quality. Also it is open source, which allows us to replace AGV routing and scheduling on an ad hoc basis.
Combining all parts results in a fully open source stack for managing TVH’s AGVs. We created a model of the AGV and a simulation environment that closely resembles the workspace, and we demonstrated its flexibility.
The result is an automated solution for intralogistics that can interact with its environment in real time, is very flexible and can easily be extended to any type of AGV.